In a blind spot monitoring system, electronic detection device(s) are mounted on the sides of the vehicle, often in the vicinity of the external rear view mirrors or near the rear bumpers. These devices send out either electromagnetic waves (usually in radar wavelengths) or take computer-processed images with a digital camera. Images are then analyzed using optical flow techniques and frame difference to detect pixels that move in the same direction as the ego (host) vehicle.
Recent reports talk of the development of a sensor-fusion based system for blind spot detection by an electronics manufacturer targeted toward the small and medium range of passenger and commercial vehicles.
Challenges pertained to accuracy and real-time operation of camera and radar algorithms. This problem can be rectified with reliable output by designing and developing factors such as CFAR (Constant False Alarm Rate) detection, clustering, tracking, optimizing, and porting onto r-Car V3M SDK-interfaced with an image recognition engine (IMP-X5-V3M) and an image signal processor (ISP), rendering the camera image distortion correction application (IMR).
This paper focuses on the implementation of a cost-effective blind spot detection solution which can be simulated with adverse scenarios. Monocular camera parameters such as focal length and intrinsic and extrinsic parameters are used for estimating the vehicle location in the Region of Interest (RoI). Once the object is detected using frame difference to eliminate false alarms, we can calculate the direction of motion of vehicles using optical flow and filtering vehicles which move in the reverse direction.

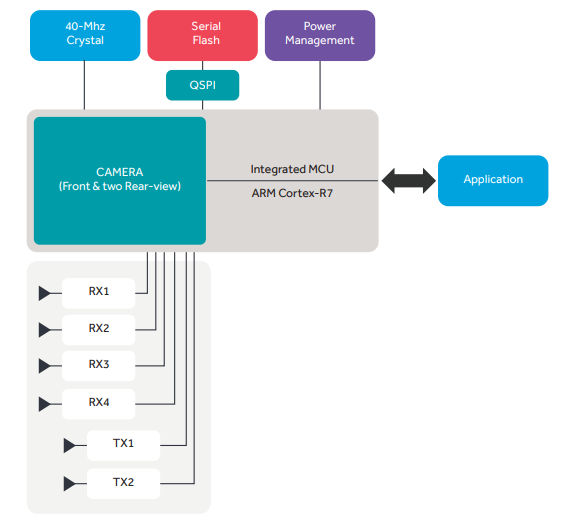
The setup consists of a custom board built using a Renesas’ r-Car V3H SoC device. This has a self-contained video encoding signal processor (VSPD) for inter-device video transfer (iVCP1E) single-chip sensor that simplifies the implementation of automotive vision sensors in the 10~60Hz band. The figure below explains the basic architecture, which consists of an antenna, ARM R7, CAN, and other interfaces.
Tools for stack customization/optimization:
MS Visual studio 2012, OpenCV library, Eclipse IDE, r-Car V3H




01 Edge features
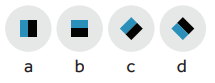
02 Line features

03 Center-surround features
04 Warning display
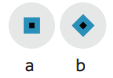
Blind spot detection (BSD) warning is displayed by the image icons below.

When BSD Region of Interest is free (No Vehicle condition)
When BSD Region of Interest is occupied (Vehicle detected)
Within the blind spot area of host vehicle (ego), the onset vehicle behind the ego car moves in the direction of sensor zone (left and right) and enters the zone from the free area to trigger BSD via the methods depicted through image pre-processing, motion/direction detection, followed by object detection and classification.