Building a robot capable of maneuvering an intended environment is critical. Ask yourself what platform and type of maneuverability will fit your project needs.
The section below discusses different maneuver capabilities and their application.
Types of robotics arms
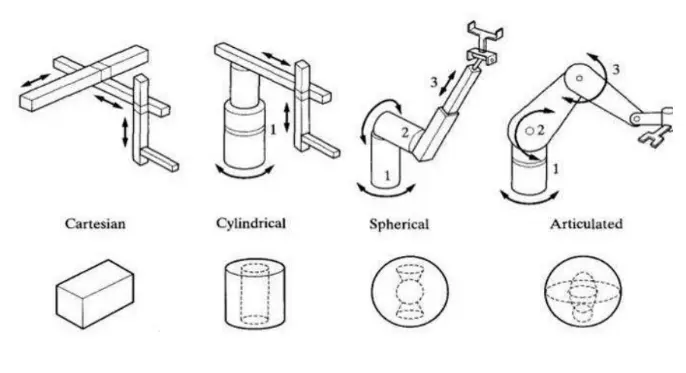
There are six major types of robotic arm configurations: Cartesian, Cylindrical, Spherical, Selective Compliance Articulated Robot Arm (SCARA), Articulate, and Delta (Parallel).
The Robotic arm has already been used extensively in the manufacturing and automotive industries.
Work profile of robotic arms
The work profile of a robotic arm determines which type suits an application. Work profile essentially means the reach of the robotic arm in a particular environment that enables performing its task. The work profile for the various robotic arm configurations differs.
There are a wide variety of factors that invalidate the assumptions made during the test efforts. Such factors include the rest of the software stack, the quality of the sensors, actuators, and communication infrastructure, and the physical environment. Open-source robotics platforms provide a solution to this very problem. An open platform is a complete recipe for building, programming, and using a robot.
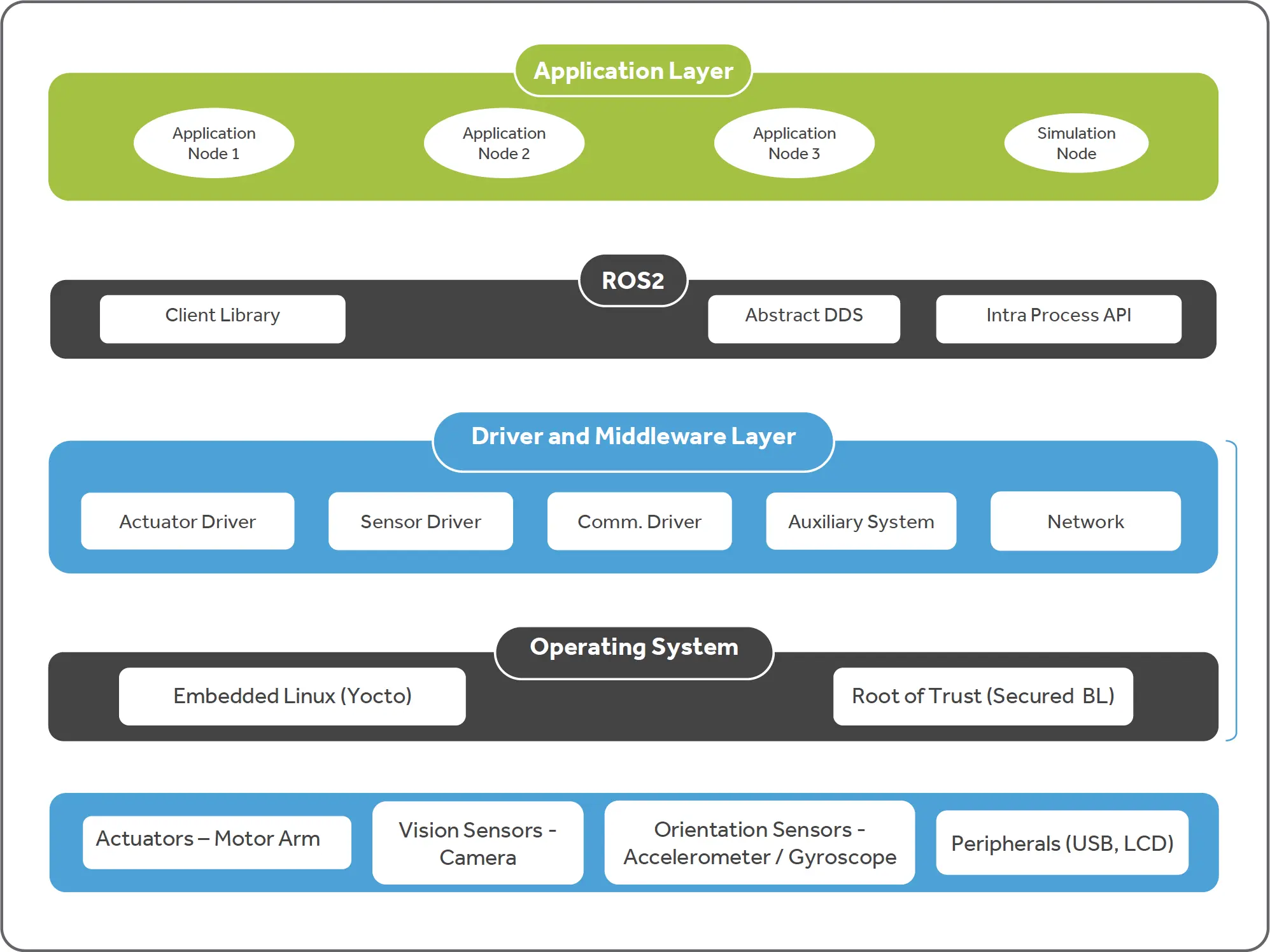
The graphic below shows the architecture that uses the Robot Operating System (ROS) open platform. It is well-supported, relatively affordable, and extensible. ROS enables users to leverage various types of algorithms and simulation packages. It provides a common ground of testing and virtual commissioning by integrating with tools such as Gazebo and Rviz.
The software-defined platform is built on reusable components which adapt to customer needs and provide enablers for various robotic services. The diagram below depicts a general service/application layer that the robot platform should provide.
The platform supports a camera module through which one can achieve computer vision and object recognition. AI-based image recognition algorithms have incredible accuracy and allow robotic arms to perform tasks such as locating and placing specific objects. Using the cloud, various analytics can be done in the background to train the algorithm and improve efficiency.
For Natural Intelligence (NI), one needs a camera with a 360-degree view as well as collision map, depth calculations and 3D view of the surrounding environment. Using this data, NI helps to navigate the robot and avoid the collision.

When choosing a software platform, the following points can be considered: Modular design: Is the design approach breaking the larger code into smaller sections that hold specific functions? Modular design is shown to improve the design process by allowing better reusability, workload handling, and easier debugging processes.
Edge processing vs cloud processing: AI modules can run on the edge device to make the inference quick and realtime, and minimal data for alerts can be sent to the cloud. Here, cloud analytics can be done for metrics such as usage patterns, efficiency, diagnosis and logging.
Platform layer vs application layer: The base platform should provide the required SW (built on open source with advantages of cost and community support) and HW (standard off-the-shelf vendor-independent) that is needed to build an application for the requirements of a specific customer.
Test suite to verify various libraries and integrate HW and SW modules.
Team to support and customize as per your need.
In approaching an investment in robotics, one should consider the various aspects of an application prior to making a final selection. Here are a few more factors to consider - reach and payload, flexibility, speed, space and footprint, maintainability, repairability, availability, and standardization.


Sumeet Das is a lead architect in Cyient and has experience in design and development of embedded systems for industrial automation and medical use.

Vishwanath Pratap, who leads solutions for medical devices in Cyient, has experience in design and development of medical devices throughout the product development cycle.