As automotive technology evolves rapidly in vehicle architecture to meet the growing demands of connected mobility and complex active safety goals, vehicle architecture needs to keep pace to handle growing volumes of data and support new and innovative applications. The latest AUTOSAR Adaptive platform is a step towards a mature standard framework for developing advanced driving assistance systems (ADAS) applications.
With vehicles becoming intelligently aware of their proximity to newer technology drivers, functional performance requirements of system-on-chip (SoC) processors have multiplied. However, the increased need for computing power calls for much more than multicore SoCs presently used by the AUTOSAR Classic Platform.
To accelerate with new innovations in the automotive market, the existing AUTOSAR Classic architecture is not feasible to support critical applications that use multi-sensors and usage of realtime data communication signals to take driving decisions. This has led to the development of a new platform, AUTOSAR Adaptive, to handle evolving high-performance requirements.
To achieve the robust performance requirements of modern Automotive Electrical/Electronics (EE) architecture, there are combined effects of processors and rapid communication accelerators. As a single chip is combined with processing elements, communication between the processing elements becomes orders of index faster and more efficient than legacy inter-ECU communications. This is furnished by high-performance computing and communication mechanisms from AUTOSAR Adaptive, which offers flexible configurations using Off-The-Shelf (OTS) Software.
AUTOSAR Adaptive aims to provide an environment with higher data rates/computing power, active deployment of new functionalities, interaction with non-AUTOSAR applications, support for OTA system updates and other services.
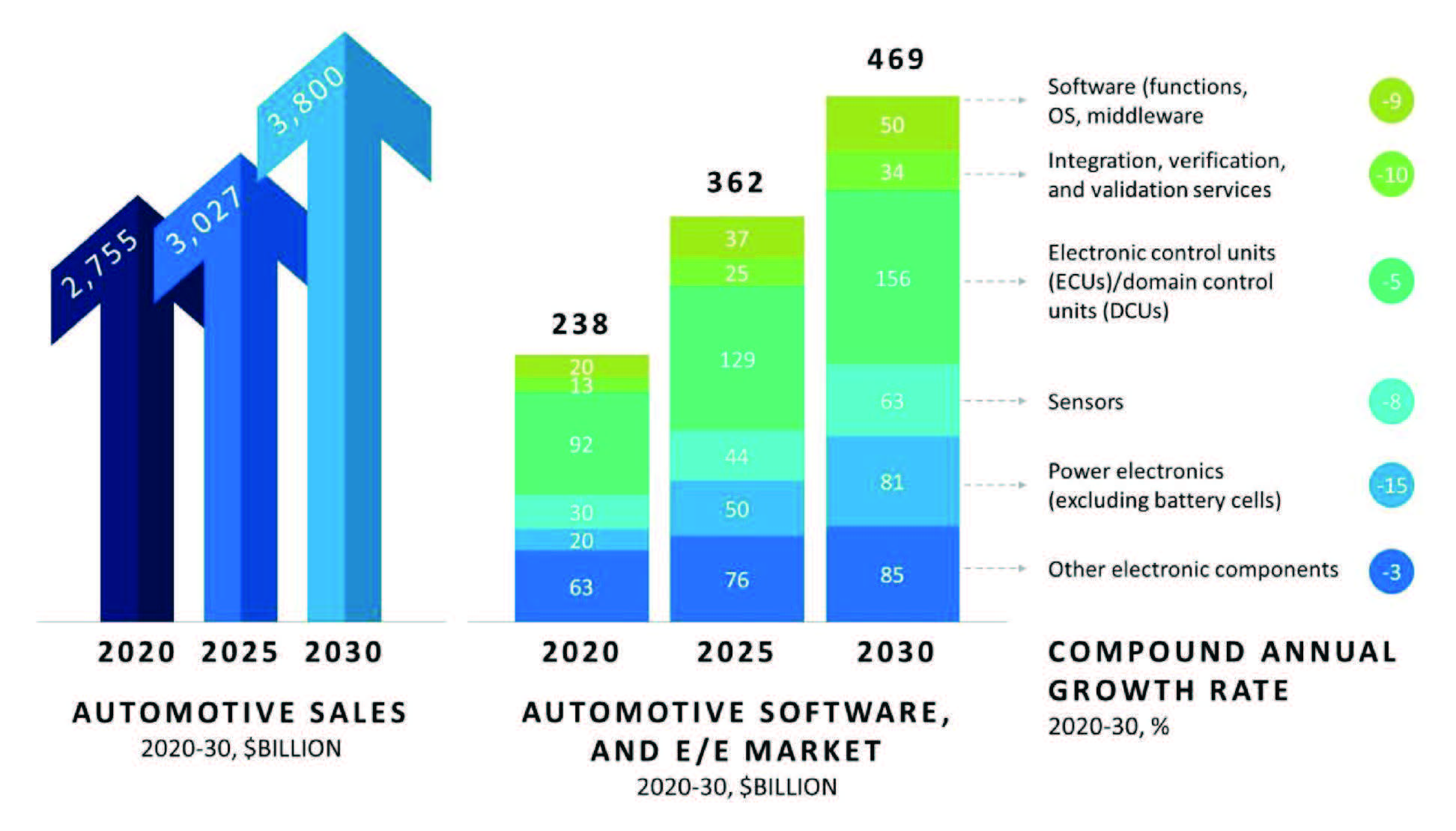
Courtesy: McKinsey Report
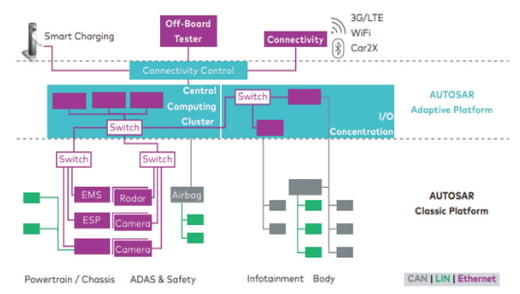
Source - Vector
Further updates of today’s driver assistance/ safety systems, such as Adaptive Cruise Control (ACC), Automatic Emergency Braking (AEB), Blind Spot Detection (BSD), Auto Park Assist (APA), Lane Departure Warning (LDW) system, etc., pave the way for highly automated driving and autonomous parking. Future cars will be connected to almost everything, such as smart homes, roadside units, and vehicles around them, and thus will become a part of the Internet of Things. The Adaptive platform offers a secure platform that helps enable future automotive needs and achieve new functionalities. Therefore, a combination of AUTOSAR Classic and Adaptive will drive the automotive software infrastructure for safe and secure high-performance applications.


AUTOSAR Adaptive does not guarantee backward compatibility with the previous version. Upgrading to a newer version requires enormous effort and time. If a feature in the latest version is required to be supported, it needs customized development

There are certain dependencies with specific POSIX-compliant operating systems. Migration efforts are on to support multiple OS platforms. A design approach must be devised to develop an OS abstraction layer catering to widely used operating systems such as QNX, VxWorks, Integrity, etc.

Migrating a non-SOA application into AUTOSAR Adaptive architecture is complex. The existing applications need to be converted into services, checked if required by other ECUs and that these services are not redundant, and then host the Service catalog. The migration/integration of the existing C-based application or components into the Adaptive Platform will require tremendous time and effort as AUTOSAR Adaptive is based on C++

Specifications for AUTOSAR Adaptive foundation, services/ system tests are still in the concept phase and evolving

Evaluation of OSS and devising a strategy to ensure that the OSS does not impact the system where it is being used. This poses a significant problem when in safety-critical systems