The word “radar” stands for radio detection and ranging. This pre-WW II technology was used to track the speed, position, and direction of ships and aircraft. Now radars have become important sensors in advanced driver assistance system (ADAS) applications because they can easily detect metal objects like cars, trucks, and buses.
How radar works?
Radar systems emit radio waves, a type of electromagnetic energy that can be sent into the air. These signals travel at the speed of light. These waves reflect back from objects in the radar’s path and are processed by the radar receiver. These returned pulses enable the radar to determine the distance, velocity and position of objects, relative to the radar system’s position.
Here's a simplified explanation of how radar works:
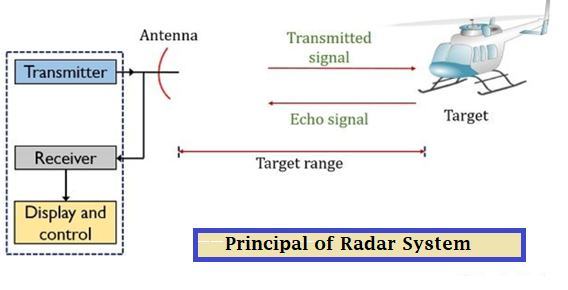
- Transmitter: Radar starts with a transmitter that generates radio waves. These waves are electromagnetic signals with specific frequencies, typically in the frequency range of 5MHz to 130 GHz.
- Antenna: The transmitter sends these radio waves through an antenna, which focuses and directs the waves in a specific direction, forming a beam.
- Propagation: The radio wave beam travels through the air until it encounters an object in its path.
- Scattering: When radio waves encounter an object, some of the energy is scattered in various directions, determined by the size and shape of the object.
- Echo reception: Part of the transmitted energy is reflected back by the object toward the radar system as an echo. This echo contains valuable information about the object, such as its distance, velocity and direction.
- Receiver: The radar system uses a receiver with an antenna to detect and capture the echoes bouncing back from the objects.
- Processing: The radar system processes the received echoes to determine the characteristics of the detected objects. The time it takes for the signal to return provides the distance to the object, while the Doppler effect (frequency shift of the reflected signal) gives information about the object's speed and direction of movement.
- Display: The processed information is then displayed on a radar screen or monitor, where operators can interpret and analyze the data. The display typically shows the position and movement of detected objects relative to the radar's location.
Key factors in radar performance
- Frequency: The choice of frequency affects the radar's range, resolution, and ability to penetrate certain materials. Lower frequencies can penetrate obstacles but have poorer resolution, while higher frequencies offer better resolution but are more easily absorbed or scattered.
- Polarization: Radar waves can be polarized either horizontally or vertically. Different polarizations can help reduce interference from specific types of clutter and improve detection in certain conditions.
- Radar cross section (RCS): This refers to the reflective ability of an object. Objects with a larger RCS are more detectable by radar.
- Doppler effect: By analyzing the frequency shift of the returning signal, radar can determine whether an object is moving toward or away from the radar station and calculate its speed.
- Range resolution: This is the ability to distinguish between different targets placed in the same angular direction but at different distances from the radar.
Velocity and distance calculation
Velocity and distance are calculated using radar based on the time delay and Doppler effect observed in the received radar signals.
Here's how each parameter is determined:
- Distance calculation: The radar system measures the time it takes for the echo to return to the radar antenna from the object. Since radio waves travel at the speed of light (2,99,792 km per second), the time delay can be converted into a distance measurement using the formula:
Distance = (Speed of light × Time delay) / 2
The division by 2 is necessary because the radio wave has to travel to the object and then back to the radar, so the total distance is twice the distance from the radar to the object.
- Velocity calculation: The velocity of an object is determined using the Doppler effect, which is the change in frequency of the radar signal due to the relative motion between the radar system and the object.
When an object is moving toward the radar, the reflected radar waves are compressed, causing an increase in frequency. Conversely, if the object is moving away from the radar, the waves are stretched, resulting in a decrease in frequency.
The formula to calculate the velocity is:
Object velocity = (Change in frequency × Wavelength of radar signal) / 2
Where:
- The change in frequency is the difference between the transmitted frequency and the received frequency of the radar signal due to the Doppler effect.
- The wavelength of the radar signal is inversely proportional to its frequency.
By measuring the change in frequency, which is related to the object's velocity, the radar system can determine how fast the object is moving relative to the radar.
It's important to note that the accuracy and precision of distance and velocity measurements depend on various factors, including the radar's frequency, power, antenna design, signal processing techniques, and the target's radar cross-section. Doppler radar systems are widely used to measure the velocity of moving objects, such as weather systems, vehicles, and aircraft, while traditional radar systems can calculate distances and positions of both stationary and moving targets.
What is a radar sensor in ADAS?
A number of different sensing technologies are being used currently including radar, LiDAR (light detection and ranging), infrared (IR), ultrasonic and camera. Each of these technologies has advantages and disadvantages, and most ADAS systems today rely on multiple technologies to provide reliable solutions to market. Some key applications of Radar in ADAS are automatic emergency braking, adaptive cruise control, cross-traffic alert, and blind spot monitoring.
Automotive radar typically works on 77GHz and the modulation technique used is frequency continuous modulated wave (FMCW).
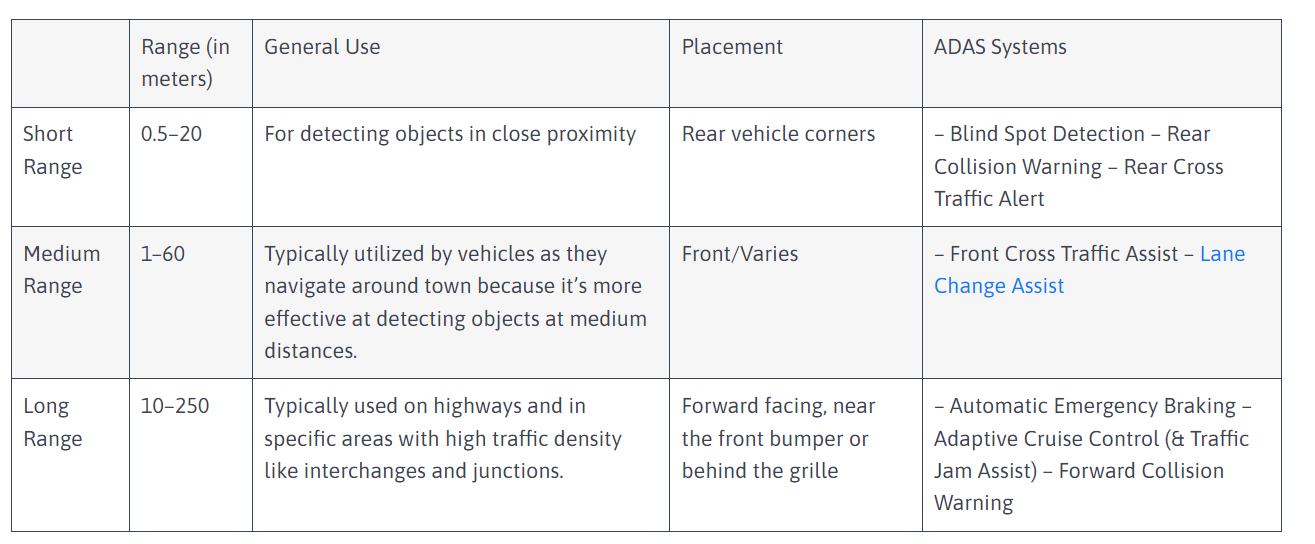
Automotive radars fall into three categories:
- Short-range radar (SRR) – 0.5 to 20 meters
- Medium range radar (MRR) – 1 to 60 meters
- Long-range radar (LRR) – 10 to 250 meters
Pros and cons of radar for ADAS
Compared to camera-based systems, radar systems have the following advantages:
- Real-world working conditions, such as temperature, humidity, etc., do not affect the functioning of radar-based systems. One of the key advantages of radar is that it works seamlessly under varying light conditions–night or day.
- Long-range radar systems can comfortably handle a range of 30 to 250 meters.
- Materials that are generally considered insulators, such as rubber and transparent objects like glass, do not affect radar-based systems.
- It is relatively easier to accurately measure the velocity, distance and exact position of an object using radar systems.
- Radar systems can easily differentiate between stationary and moving objects which is one of the major shortcomings in proximity sensor-based systems.
- Radar systems can detect multiple objects simultaneously, which cannot be done by proximity-based sensors.
- Radar systems, when used in conjunction with existing camera-based systems, can create a 3D image by means of angle detection of the object and sensor fusion with existing camera-based data.
Despite the benefits radar offers, it has a few drawbacks.
- Detecting small objects with radar is relatively difficult for shorter wavelengths.
- In static object detection where, relative velocity is exactly that of the moving object, obtaining the necessary reading is quite difficult and requires proprietary algorithms to address this issue.
- Existing radar-based ADAS systems do not work well in closed environments such as tunnels as they go into standby mode.
- Radar-based systems have their limitations when it comes to recognizing and classifying objects.
- Interference from other radar systems, may affect accuracy.
To overcome the limitations of individual sensors, many modern ADAS systems use sensor fusion, combining data from radar, cameras, LiDAR, and other sensors. This fusion enhances the overall perception and reliability of the system, allowing the vehicle to have a more comprehensive understanding of its surroundings.
In summary, radar technology in ADAS applications is pivotal for improving road safety. Its ability to accurately detect objects, measure distances, and assess speeds provides critical data for ADAS systems to make informed decisions, prevent collisions, and assist drivers in various driving scenarios. Continued advancements in radar technology will further enhance the capabilities of ADAS, moving us closer to the goal of autonomous driving.
About the Author
Purushothama is a software architect/developer and has pursued his Master’s in VLSI Design. He has over 15 years of embedded and automotive industry experience with an interest in building new end-to-end AI solutions, that accelerate human well-being and developing different autonomous models for human-friendly interactive machines in the automotive and agriculture fields.
.png?width=774&height=812&name=Master%20final%201%20(1).png)



