
Reduced operational costs for a leading information services company
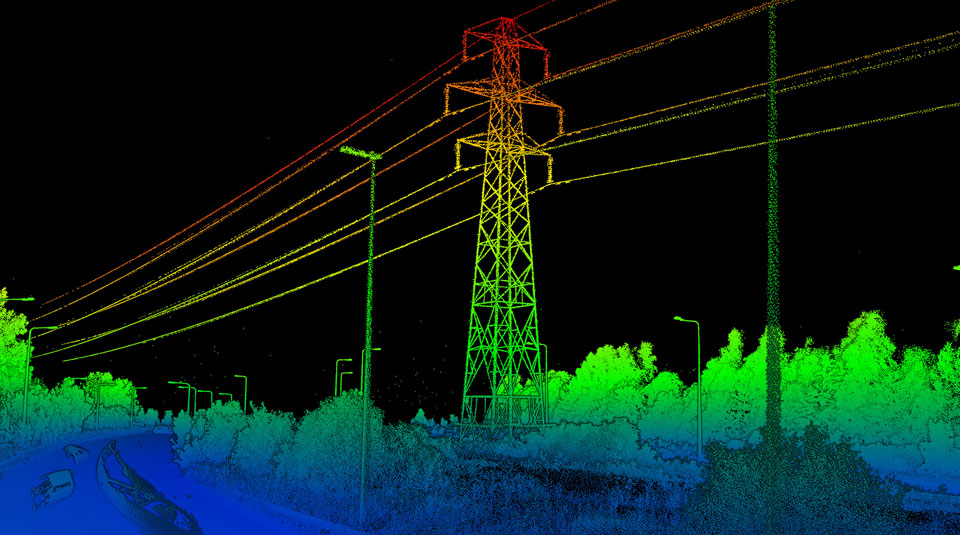
We captured LiDAR data and processed raw point cloud to classify low elevation LV, MV, HV, and communications lines along with the vertical clearance information. This helped the customer to reduce the feet on the ground and bring down operational costs.